Control system design for high precision, high-speed 5-Axis coordinate measuring machine.
Coordinate measuring machines are quality control inspection tools used in industry to verify the dimensional measurements of a part or product. Inspections are typically the slowest parts of a manufacturing process. As the economy demands higher throughput and more efficient manufacturing, industry's focus has shifted to concentrate on improving the inspection process.
The HCMM is a parallel architecture machine with five actuated legs and a passive leg. Each actuated leg has a frameless, brushless DC motor, an encoder, over-travel and home sensors, and a brake. Additionally, the hollow legs of the HCMM provide a pathway for a laser interferometry system. This laser system determines the length of each leg to sub-micron accuracy.
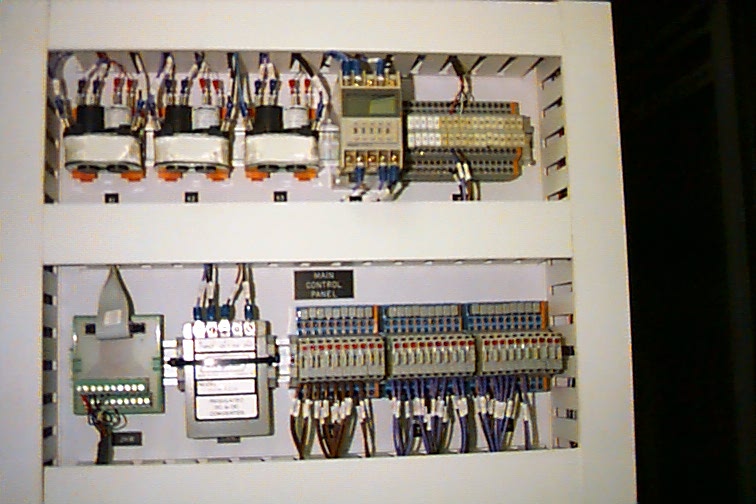
A PMAC2 motion controller controls all of the motion, safety, and human-machine interface functions on the HCMM. Because of the HCMM's configuration, in order to do Cartesian Coordinate moves, inverse kinematics must be performed. Since the movement of each leg on a HCMM both translates and rotates the probe tip, it takes the simultaneous coordinated movement of all actuators to produce a pure translation or pure rotation motion. The HCMM software performs these calculations so that this process is transparent to the user and part programmer.
This HCMM is part of the Machine Tool Research Center at the University of Florida. Perry Automation was involved in all aspects of the controller design and installation.
Control system design and fabrication for a miniature milling machine.
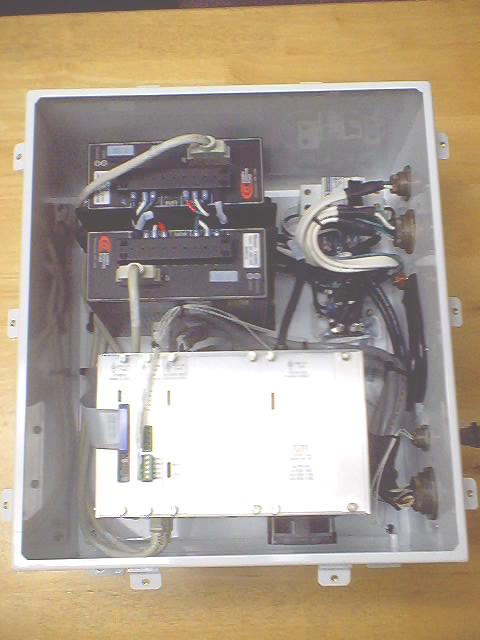
Using their machine tool background, engineers from Perry Automation designed the control system for this miniature milling machine. Delta Tau's PMAC NC Software is used to control the machine. This software allows for real-time communication between the PMAC controller and a host PC. This gives the machine almost limitless memory. The data files used to represent the intricate parts that this machine will mill contain 40MB of information.
Another interesting feature of this machine is that it incorporates a fully automatic tool changer. A magazine of end mills allows the part programmer to choose the proper tool for each milling application.
  |
  |
  |
| Left View |
Sample Workpiece |
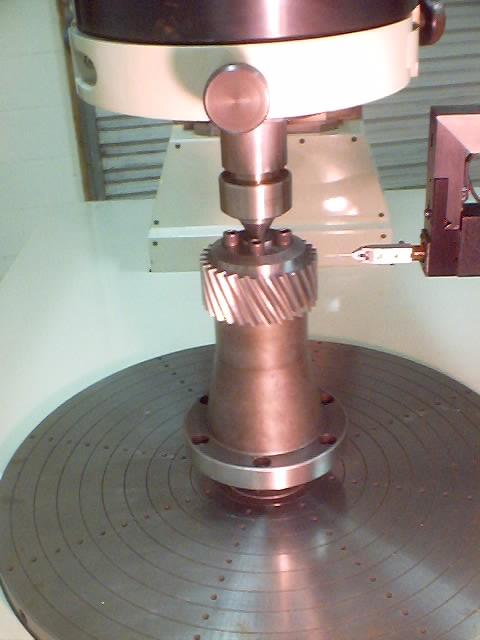
Center View |
Designed primarily to showcase modern technology, this miniature milling machine will be the centerpeice of a kiosk at a major theme park. The milled artwork from this machine will be sold to the parks visitors.
Control system design and control cabinet manufacture of 2-Axis pedestal controllers.
These systems utilize Delta Tau UMAC controllers with sinusoidal encoder feedback for high accuracy and resolution.
The pedestals are used to steer anything from radar to satellite antenna.
Gear Inspection machine control software and Windows user interface.
This system utilizes a Delta Tau UMAC for control of 3 linear axes and 1 rotary axis. Feedback is via glass scales. The user inteface software provides a real time simulation of the gear and machine
Control System and Software for 6-Axis PUMA Robot.
This system utilizes a Delta Tau UMAC for control of 6 rotary axes. We built the control system and created the user inteface using our ServoSolution software.
Designed and Built Machine and Control System for Lens Mounting Inspection.
This system utilizes a Delta Tau MACRO for control of 1 linear axis and 1 rotary axis as well as 2 linear scales and a vision system for the error measurements. We designed and built this entire machine at our St. Petersburg Facility.